개요
표본기는 T초 마다 닫히는 스위치이다.
입력된 연속 신호를 r(t)를 표본기를 지나면 r*(t)의 이산신호가 된다.
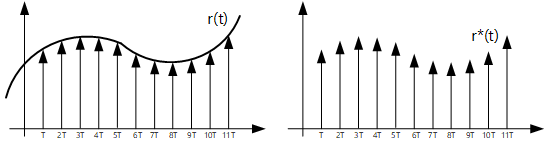
nT시간의 이산값은 식(1)과 같다.
r∗(nT)=r(nT)δ(t−nT)(1)
모든 신호 r(t)에 대한 이산 신호는
r∗(t)=k=0∑∞r(kT)δ(t−kT)=r(0)δ(t)+r(T)δ(t−T)+r(2T)δ(t−2T)+...(2)
r∗(kT)에 대한 라플라스 변환은 L[r∗(kT)]=F∗(s)이고 식(3)과 같다.
F∗(s)=L[r∗(t)]=L[k=0∑∞r(kT)δ(t−kT)]=k=0∑∞r(kT)e−ksTz=esTk=0∑∞r(kT)z−k=Z[r∗(t)]=R(z)(3)
식(3)은 r(t)신호의 이산 신호에 대한 라플라스 변환을 진행한 것으로 볼 수 있으며 이를 r(t)의 z-변환이라 한다.
위의 과정을 통해 z-변환은 :
- f(t)의 샘플링으로 f(kT)을 얻는다. f(kT)는 임펄스 함수들의 열의 집합이다.
- 임펄스 열의 라플라스 변환(F∗(s))을 취한다. F∗(s)는 esT항을 포함하고 있다.
- z=esT 치환하면 F∗(s)=F(z)가 된다.
z-변환 예제
단위 계단 함수의 z-변환
u(t)함수를 이산 신호로 만들면 식(4)와 같다.
u(t)=k=0∑∞u(kT)δ(t−kT)(4)
U(z)=Z[u(t)]=k=0∑∞u(kT)z−ku(kT)=1k=0∑∞z−k=1−z−11=z−1z(5)
지수함수의 z-변환
r(t)=e−atdiscretizationr∗(kT)=e−akT,t⩾0
z-변환하면
R(z)=Z[r∗(kT)]=Z[e−akT]=k=0∑∞r(kT)z−k=k=0∑∞e−akTz−k=k=0∑∞(zeaT)−k=1−(zeaT)−11=z−e−aTz(6)
sin함수의 z-변환
r(t)=sin(ωt)discretizationr∗(kT)=sin(ωkT),t⩾0(7)
오일러 공식을 이용하여 식(7)을 식(8)과 같이 변형한다.
sin(ωt)=2jejωt−e−jωt(8)
식(8)을 식(7)에 대입하면
r∗(kT)=sin(ωkT)=2jejωkT−e−jωkT
z-변환하면
R(z)=Z[r∗(kT)]=Z[sin(ωkT)]=k=0∑∞r(kT)z−k=k=0∑∞2jejωt−e−jωtz−k=2j1(Z[ejωt]−Z[e−jωt])=2j1(z−ejωTz−z−e−jωTz)(9)
R(z)=Z[sin(ωt)]=2j1(z−ejωT)(z−e−jωT)z(z−e−jωT)−z(z−ejωT)=2j1z2−(ejωT+e−jωT)z+1z(ejωT−e−jωT)=z2−2cos(ωT)+1zsin(ωT)(10)
램프함수에 대한 z-변환
f(t)=t,t≥0discretizationf(t)=k=0∑∞(kT)δ(t−kT)
z-변환을
F(z)=k=1∑∞(kT)z−k=zT+z22T+z33T+...(11)
식(11)을 zT로 나누면 식(12)와 같아진다.
zTF(z)=z21+z32+z43+...(12)
식(12)에 적분을 취하면
∫zTF(z)dz=−z1−z21−z31−...+α(13)
여기서, α는 적분 상수이다.
식(13)의 오른쪽 항은 무한 등비수열이고 이 합은 식(14)가 된다.
∫zTF(z)dz=−z−11+α(14)
식(14)에 미분을 취하면
zTF(z)=(z−1)21(15)
그러므로,
F(z)=(z−1)2zT(16)
수열 ak에 대한 z-변환
f(t)=k=0∑∞akdiscretizationf(kT)=k=0∑∞akδ(t−kT)
F(z)=k=0∑∞akz−k=1+za+z2a2+z3a3+...
이는 첫항이 1이고 등비가 za인 무한 등비수열이고 이 합은
F(z)=1−a/z1=z−az
라플라스 함수에 대한 z-변환
X(s)=L[x(t)]=s(s+1)1에 대한 z-변환을 구한다.
X(z)=Z[x(t)]=Z[L−1(s(s+1)1)]=Z[L−1(s1−s+11)]=Z[u(t)−e−t]=Z[u(t)]−Z[e−t]
X(z)=z−1z−z−e−Tz=(z−1)(z−e−T)z(1−e−T)
로그인 하면 댓글을 쓸 수 있습니다.